JLCPCBに基板と3Dプリントを発注しました!

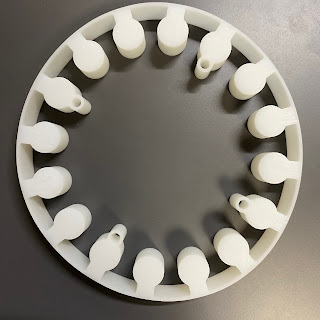
<発注物について> 今回はJLCPCBという会社で 電源基板兼、モータドライバ基板(紫&白) メイン基板(紫&白) ボールセンサの遮蔽版 ロボット置き ロボットのフレーム を発注させていただきました。 <発注先について> JLCPCBという会社に発注させていただきました。基板発注をすることで、基板の手配線に、大切な時間や労力をかけずに基板を作ることができます。 今は私はJLCPCBさんにスポンサーになっていただいているので無料で発注していますが、前まではしっかりとお金を払って基板を発注していたので、その点は安心していただきたいです。 私はこの会社に約2年ほどお世話になっていて基板発注だけでなく、精度の良い3Dプリント物も発注しています。 以前に発注した時のブログ↓ https://edge-bee.blogspot.com/2022/10/jlcpcb.html https://jlcpcb.com/JPV ↑JLCPCBのホームページ 今なら新規ユーザーに$54クーポンを頂けるらしいです <発注した3Dプリント物について> ボールセンサの遮蔽板 これは前に発注していて、数が足りなかったので、今回もう一度購入しました。 これだけだと少ない文章になってしまうので、ボールセンサの進化の過程を載せておこうと思います ロボット置き これは以前に学校の3Dプリンタで作ってみたのですが、下の写真のように芸術作品になってしまい、もう一度同じことが起こるのが怖くて、発注させていただきました。(ただ単にフィラメントの温度と速度を変更してしまったことが原因だと思うのですが、、、) ただ発注するととてもきれいにできます!少し粉がついているのが苦手ですが、、、 そこでここにはその芸術作品を飾らせていただきます! ロボットのフレーム この部品はチームメイトが作ってくれました!学校の3Dプリンタでは直径200mm以上のプリント物を作るのが難しくて、発注させていただきました! ↓発注した3Dプリントたち ...
.png)